عبد الملك حلواني
يميل معظم الأطفال ان لم يكن كلهم الى الألعاب التركيبية، لذلك ظهرت في أواخر ثمانينات القرن الماضي فكرة الدمج مع الإلكترونيات من أجل تعليم العلوم والرياضيات والتكنولوجيا والهندسة، وبذلك كانت بداية الروبوت التعليمي. تميز الروبوت التعليمي بإدخال عناصر إلكترونية الى الألعاب التركيبية وكذلك استبدال قطع التركيب التقليدية بقطع جديدة أكثر مناسبة لهيكل الروبوت التعليمي، كما يظهر في الصورة رقم 1 تطور القطعة التركيبية
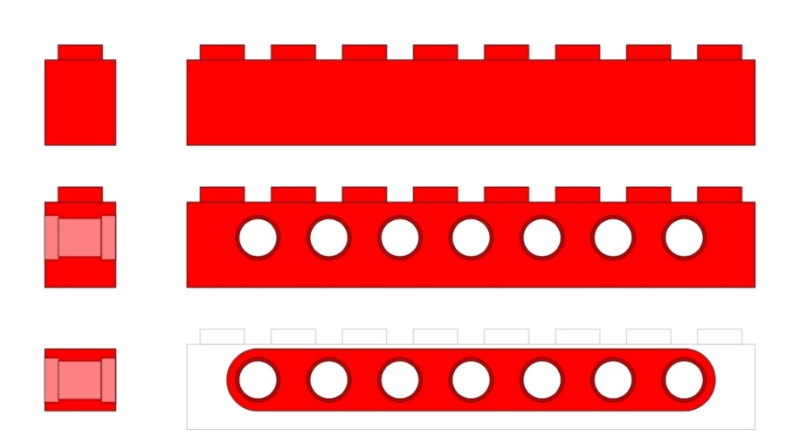
الصورة 1: يظهر في هذه الصورة تطور قطعة الألعاب التركيبية التقليدية الى القطعة الحديثة ولمستخدمة لبناء هيكل الروبوت التعليمي، الصورة مأخوذة من (Brighton Toy and Model Museum)
يُبنى تدريس الروبوت التعليمي على استراتيجية التعلم عن طريق البناء (Constructionism) (Papert & Idit, 1991) المبنية على الفلسفة البنائية (Constructivism) التي أتى بها عالم النفس السويسري جان بياجيه. وفيه يكتسب المتعلم المعرفة عن طريق بناء نماذج للروبوت ومن ثم اختبارها، بعد ذلك يتم تطوير النماذج الى أُخرى أكثر تعقيدا وهكذا تُبنى المعرفة. يتم تقسيم الطلبة الى مجموعات صغيرة مكونة من ثلاثة الى خمسة طلاب، وتمتلك كل مجموعة حقيبة من حقائب الروبوت التعليمي. يُقسم الدرس الى ثلاث مراحل:
ولا تنتهي العملية التعليمية عند هذا الحد، بل وتستمر بتطوير النماذج الحالية أو بناء أُخرى جديدة. أما فيما يتعلق بإدارة الدرس، فإن المعلم يستخدم أسلوب الاستكشاف الموجه مع طلبته.
هناك العديد من الشركات المصنعة للروبوت التعليمي، منها شركة الليجو (Lego Education)، وشركة فيكس (VEX Robotics) وفيشرتكنك (fischertechnik). لكن أكثرها استخداما هو روبوت الليجو.
روبوت الليجو ميندستورمز (EV3)
هو ثالث روبوتات الليجو وسبقه روبوت (RCX) وروبوت (NXT) وتم إدخاله الى السوق في أيلول من عام 2013. يتكون الروبوت من لبنة ذكية تُمثل عقل الروبوت، وحساسات أو مجسات لإدراك البيئة المحيطة، ومحركات لتحريك الروبوت أو التأثير في البيئة المحيطة بالإضافة الى سماعة وأجهزة تواصل ومنافذ للتوصيل. ويظهر روبوت (EV3) بأجزائه في الصورة رقم 2، وفيها تظهر اللبنة الذكية ومحركان كبيران (1) مع محرك متوسط (2)، وحساس اللمس (3)، وحساس الجايرو أو الزوايا (4)، وحساس اللون (5)، وحساس المسافة أو الفوق صوتي (6).

|
|||||||||||
الصورة 2: يظهر روبوت الليجو بأجزائه الأساسية، الصورة مأخوذة من موقع الليجو التعليمي (Lego Education)
من المهم الإشارة الى أن الروبوت بأجزائه يحاكي الانسان من ناحية وجود العقل والحواس والجوارح. ويتميز الروبوت عن الآلات التقليدية بقدرته على تنفيذ مهام متنوعة على خلاف الآلات والتي تختص بمهمة واحدة فقط كالمكيف أو الطابعة وغيرها.
نظرا لأن الهندسة والتكنولوجيا من أدوات العصر والتي يتوجب على أي طالب ولا سيما الموهوب أن يتعلمها سواء تخصص فيها في المستقبل أو لا، ولأجل مخاطبة الجانب الإبداعي الفكري والعملي الذي يتميز به الطلبة الموهوبين، ولأجل أن نضع بين أيديهم أدوات لترجمة أفكارهم الإبداعية ومهاراتهم تم استخدام الروبوت كأداة لتعليم الطلبة الموهوبين التصميم والهندسة.
التصميم والهندسة (ORT، 2015):
تُعرَّف العملية الهندسية بأنها مجموعة من الخطوات التي يتبعها المهندسون من أجل إيجاد حل لمشكلة ما. وفي الكثير من الأحيان يظهر منتج (آلة أو برمجية) تُحقق هدف ضمن إطار معين. تختلف العملية الهندسية عن طريقة البحث العملي في أنها تركز على تصميم وبناء واختبار شيء ما. أما خطوات العملية الهندسية فهي كما يظهر في الصورة رقم 3:

الصورة 3: العملية الهندسية
التعريف بالمشكلة: تحديد المشكلة وصياغتها على شكل سؤال، كيف يتم تصميم وبناء ...؟ تحديد الاحتياجات، أي لماذا نحتاج هذا الحل؟ تحديد المتطلبات، أي الشروط الواجب توفرها في الحل المقترح.
البحث: وفيه يتم تجميع المعلومات حول الموضوع وترتيبها.
العصف الذهني: اقتراح أكبر عدد من الحلول المقترحة ومن ثم اختيار الحل الأمثل الذي يلبي الاحتياجات ويُحقق أكبر عدد من الشروط.
البناء: تطوير وتخطيط العمل بالتفصيل، ومن ثم بناء النموذج الأولي
التقييم: وفيه يتم فحص كون المنتج يلبي الاحتياجات ويُحقق الشروط. ومن ثم يتم اقتراح تحسينات وعلاج المشاكل التي تظهر. وتستمر هذه العملية بشكل دائم كجزء أساسي من العملية الهندسية.
وليس بالضرورة أن ينتقل المهندسون من الخطوة الى التي تليها بشكل خطي، فقد يتجاوز المهندسون بعض الخطوات أو يعودون الى الوراء في بعض المراحل.
من الممكن استخدام روبوت الليجو كأداة لتنفيذ الحلول الهندسية وبناء النماذج الأولية (Prototypes) وذلك لقلة التكلفة وسهولة التركيب والبرمجة، أضف الى ذلك إمكانية إعادة الاستخدام مرارا وتكرارا. مما جعل روبوت الليجو خيارا سهلا للكثير من المدارس والجامعات التي ترغب في تدريس مساقات في التصميم والهندسة.
رأي الطلبة بهذا العلم:
محمد علي شويكي:
لقد استفدت من علم الروبوت ان كل تفصيل في الحياة مهم لأجل أن تتكامل الصورة، لذلك تفادي الأخطاء في الحياة يؤدي الى نمط حياة صحيح خالي من الأخطاء. لذلك عندما نبدأ بصنع او بناء (الروبوت) يجب تركيب القطع بالمكان والوجهة الصحيحة لأنه إذا وضعت قطعة في مكان خاطئ في النموذج لن يتصرف الروبوت بشكل صحيح. وهنا يمثل الروبوت الحياة وتُمثل قطع الروبوت التفاصيل الدقيقة بالحياة، فإنها وإن كانت صغيرة فإنها تؤثر على المجسم (الحياة) في عمله أو تركيبه. فمثلا خلال تركيبي لمجسم الفيل قمت بنسيان تركيب احدى القطع الصغيرة في قدم الفيل، التي وإن كانت صغيرة لكنها أدت الى عدم تحرك الفيل. عندها قمت بمراجعة خطوات تركيب القطع ولاحظت القطعة التي نسيتها وعند إعادة تركيبها بشكل صحيح تحرك الفيل.
أما علم الروبوت فأتاح لي استطلاع التكنولوجيا الحديثة التي تعمل على تغيير المستقبل الى الأفضل. خلال تعلمي عملت على عدة نماذج منها الفيل، العربة الاساسية للروبوت، مصنع البلابل الدَّوارة، وقمنا بتصميم وبرمجة نموذج سيارة تستطيع الاصطفاف وحدها دون تدخل بشري.
عبد الله القواسمي
عند الدراسة والعمل على موضوع علم الروبوت نمت لدي القدرة على الابداع من خلال التفكير بالمشاكل التي اواجهها بشكل منطقي مما ادى الى الوصول الى مستوى اخر من التفكير. والاستفادة التي اخذتها من هذا الموضوع هي معرفة اساس الروبوت اضافة الى روح الحماسة من خلال المنافسة لبناء أفضل نموذج بين طلاب المركز.
اما بالنسبة للاستفادة على المستوى البعيد فتكون في تكوين خبرة للمستقبل واخذ شهادة اجتياز للمساق من المركز والتي بإمكاني الاستفادة منها في تدريب غيري من الطلبة. بعد تعلم هذا المساق اصبحت اريد العمل في مجال الروبوت في شركة ما لابتكار شيء جديد ومفيد او العمل كمعلم او كمرشد لإيصال المعرفة التي حصلنا عليها الى جيل جديد كما فعل معنا المعلم عبد الملك الحلواني. بعد اكتساب المعرفة الأساسية قمنا في هذا المساق ببناء وبرمجة نموذجين هما الفيل (Elephant) ومصنع البلابل الدوارة (Spinner Factory). وبعد ذلك قمنا بتصميم وبرمجة نموذج السيارة تصطف لوحدها دون مساعدة بشر.
محمد أبو خضير:
فكرة الروبوت هي فكرة مصغرة عن الحياة، كل خطوة وكل تفصيل مهما كان حجمه يبقى مهما. يساعد هذا المساق في تطوير الفكر والوعي تجاه علم الروبوت وتجاه التكنولوجيا بشكل عام، حيث زاد الروبوت من حب الاستطلاع والقراءة تجاه هذا العلم بشكل نظري وعملي.
اثناء دراستي علم الروبوت في مركز الموهوبين مع الاستاذ عبد الملك الحلواني مع زملائي في مركز الموهوبين (طلاب الصف العاشر والحادي عشر) عملنا على تصميم وبرمجة بعض نماذج الروبوت مثل: الشكل الاساسي للروبوت، روبوت الفيل، لمصنع، ونموذج لسيارة تقوم بالاصطفاف دون تدخل الانسان.
نحن الآن في عصر التكنولوجيا، اي ان التكنولوجيا تجتاح وتسيطر على العالم، وهي في تطور مستمر بحيث تجعل من الممكن ان يكون لعلم الروبوت مكانة أكبر في المستقبل القريب، حتى يدرس في المدارس وليس فقط في الجامعات لما فيه من فائدة كبيرة على الصعيد الشخصي والمهني في عصرنا هذا.
ضمن مساق الروبوتيكا لطلبة مركز الموهوبين في القدس
Lego. (2015, May). LEGO System for Learning Manifesto. Retrieved May 2015, from Lego Education: www.education.lego.com
ORT. (2015, May). Design and Engineering Process. Retrieved May 2015, from ORT: http://design-e.ort.org.il/
Papert, S., & Idit, H. (1991). Situating Constructionism. Constructionism, 1-11.